
Shooter subsystem
The subsystem designated “The Shooter” is this years primary scoring mechanism. A Note is driven into the system by the hopper where it is then sent through 4 stealth wheels. the wheels are driven by 2 NEO Vortex motors. The shooter tilt mechanism is a NEO 550 motor through a 25:1 gearbox.
Hopper subsystem
the hopper subsystem is the bridge between the intake and the launching system. an integral part of the robots function. the intake and hopper system all run off of one motor and a complex custom belt system. when the shooter elevates the hopper also moves because of a rail and gear system.
The Trapper subsystem
The Trapper is our solution to the problem dreaded by many teams, the trap. the trapper will grab a note out of the shooter subsystem and flip over to be able to score a tie breaking point in the trap. ,
The Climber system
The Climber subsystem is our big money maker. at end game one of the best ways to acquire points is to elevate. this simple scissor arm design is pulled by a 7:1 gearbox driven by two NEO motors on each side of the robot. the scissor design ensures the small and light form factor needed for our swerve drive chassis.
Chassis
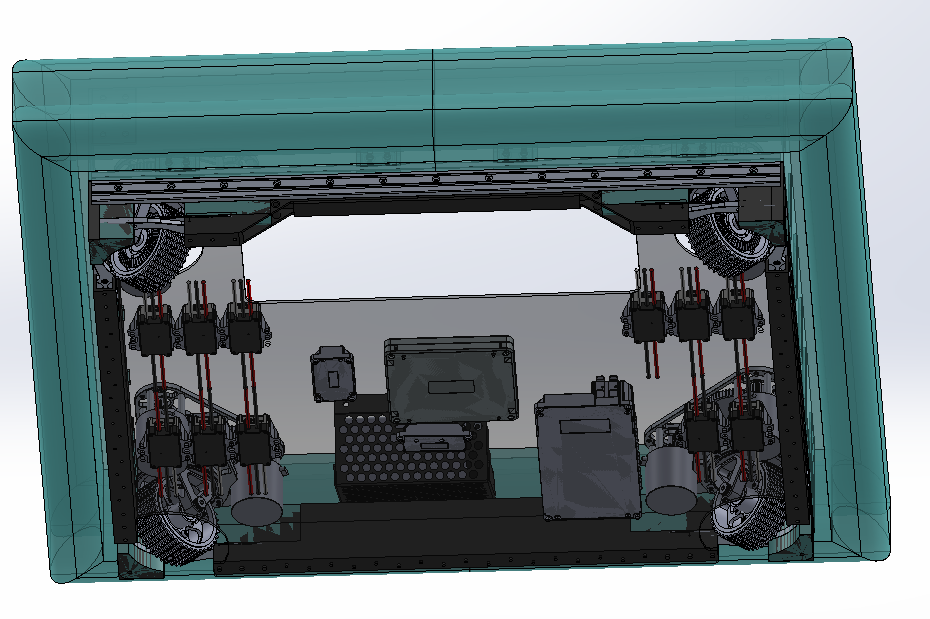 Bottom view Bottom view |  Top view Top view |
This year we decided to base our chassis around the MK4I Swerve Module. the reason behind choosing swerve vs our previously used tank drive was the new motor limitation rule (). This rule would limit us on tank but the switch to swerve has benefited us in many ways. Mainly it will allow us to be an extremely mobile robot. we cut our a chunk of the front to allow for an internal intake and hopper system. the robot has a battery mount placed at the rear for easy access and a base plate to accommodate for electronics.
 Top view Top view | 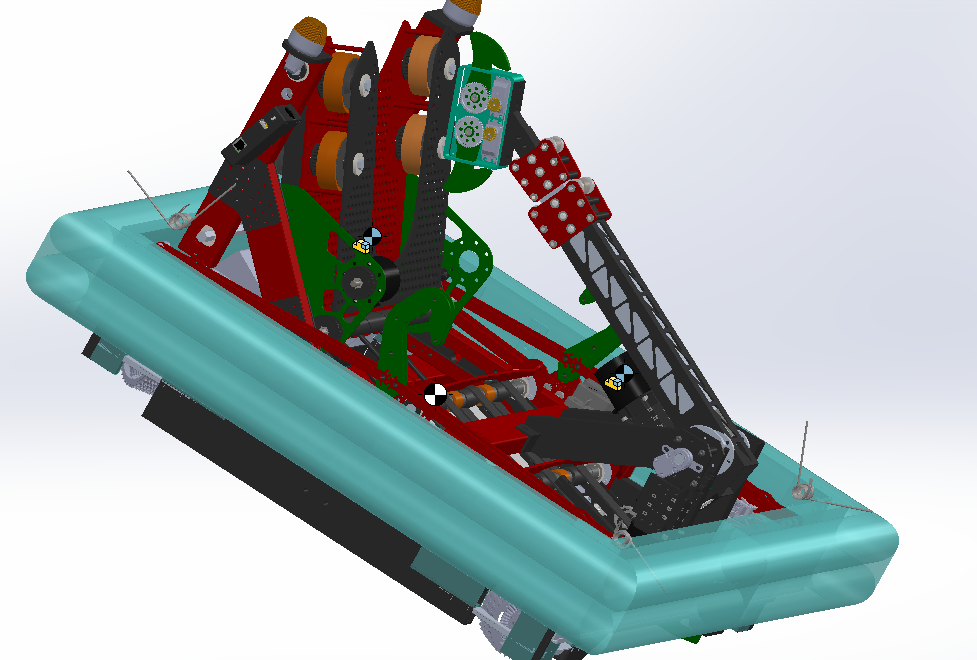 Side view Side view |
Above is the entire robot assembly. The intake and hopper feeds into the shooter. The trapper is resting on top of the intake and is fed through the launcher.